Design of Innovative Machines Lab
Many design problems are defined by a curve that changes shape. Consider the profile of a wing during a flight where lift may be reduced as fuel burns off, or a spoiler where the downward force should be increased during cornering. As the spoiler and the wing should always have a shape that is spoiler-like or wing-like as it is changing, all of the interim shapes achievable by the mechanism should still define a usable spoiler or wing. The research on this project is identifying the underlying theory that allows these systems to be designed, and developing application specific technologies.
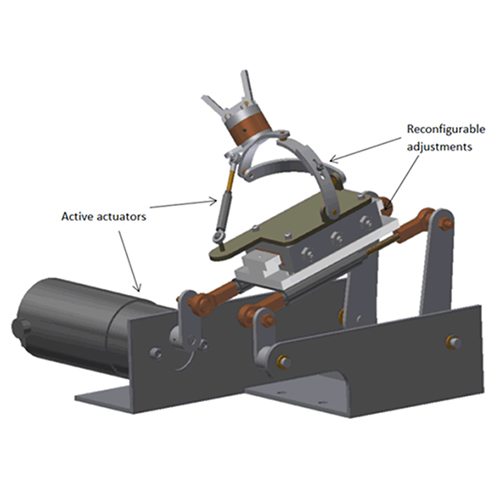
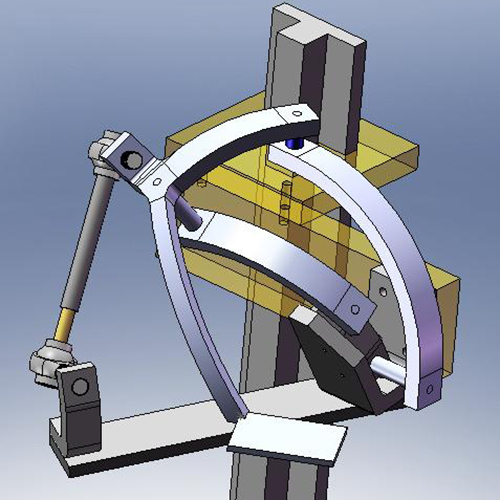
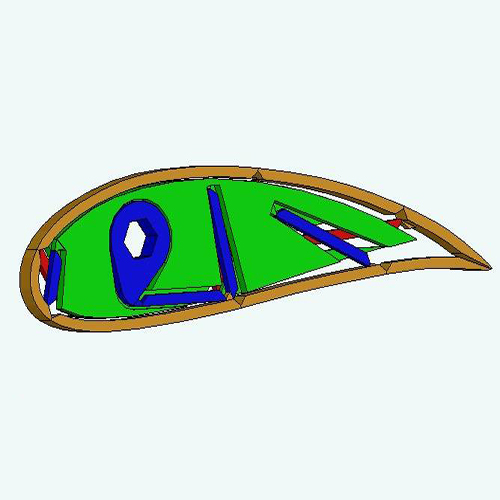
Shape-Changing Extrusion Dies
The DIMLab team is working to incorporate its shape-changing research into the field of die design. Polymer extrusion is the manufacturing process of utilizing pressure to force melted plastic through a die in order to form a long part of uniform cross section. The shape of the die defines the extruded product’s cross section. Extrusion is used to create a variety of products including tubes, pipes, gutters and molding. This process has always been achieved using solid, non-deformable dies. Shape-changing dies allow the cross section of the extrusion to change while being forced through the die. This technology offers three advances. First, new and innovative products can be developed. Second, this technology introduces the capacity to manufacture parts previously obtainable through slower and more costly techniques like molding. Third, this technology reduces waste in extrusion processes by allowing the implementation of tunable dies. Some of the design challenges facing the research team include addressing the high pressures and temperatures present in extrusion die systems, minimizing material leakage in the die assembly, and creating the methodology and practice for designing dies that create the desired shape changes in the extrusion.
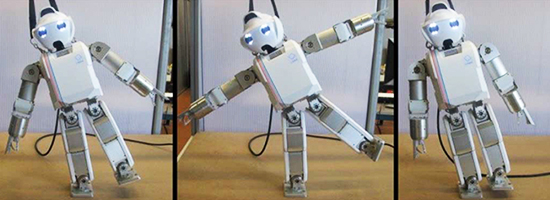
Statically Equivalent Serial Chains
This project was initiated while Murray worked with Philippe Fraisse and Sebastien Cotton of The Montpellier Laboratory of Informatics, Robotics, and Microelectronics,in Montpellier, France. The work, now continuing with Dr. Raul Ordonez of University of Dayton's Department of Electrical and Computer Engineering, has the goal of identifying the kinematic, static and dynamic properties of an articulated system with procedures that are as unobtrusive as possible. That is, can we develop an accurate model of someone simply by filming them or having them perform a few simple activities? With the goal of sizing the next generation of human-centric exoskeletons or personal flying devices, these accurate models will be critical. Visit the research page of Philippe Fraisse (of LIRMM).