7DOF Robotic Arm
7DOF Robotic Arm
7DOF Robotic Arm Controlled By Brain-Machine Interface
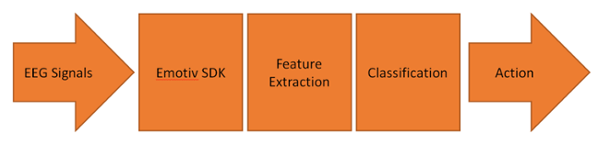
Brain machine interfaces (BMI) – also known as brain computer interfaces (BCI) – use sensors such as electroencephalographs (EEG). These systems use a number of electrodes to read electrical signals on the scalp caused by brain activity. The patterns generated by certain thoughts can be classified and used as control signals for a BMI system. The completed system allows a user to control a computer, robot, or other device by using thought as the only input mechanism.
System Overview
System Characteristics
Asynchronous: detections can occur at any time

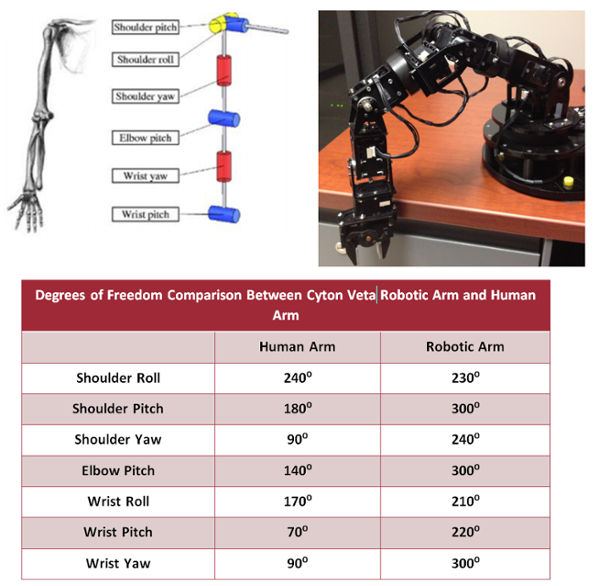
Robotic Arm
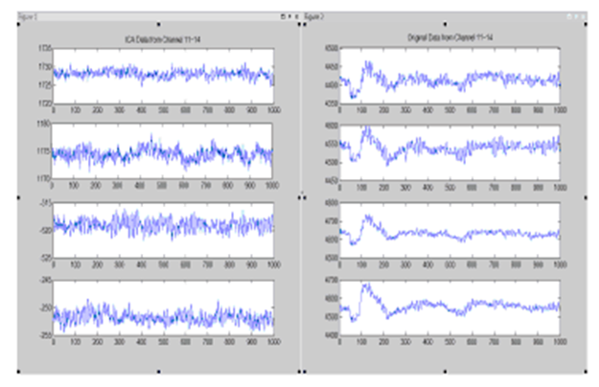
Feature Extraction
Feature extraction is performed using the FastICA algorithm. The input data uses 14 rows of 1000 data points. Each row corresponds to one of the 14 electrodes from the EEG headset.
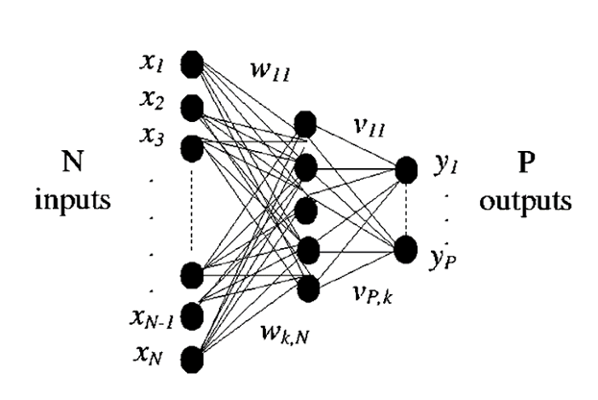
Classification
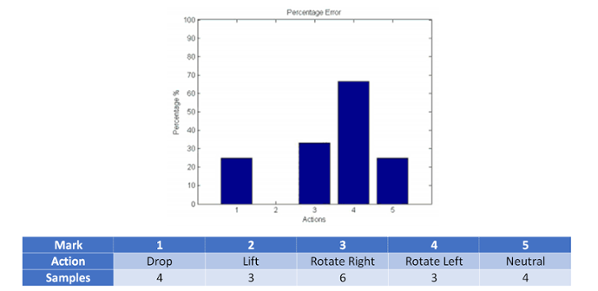
A Multi-Layer Perceptron (MLP) classifier is used to classify the data between 5 possible output classes. The output classes are lift, lower, rotate left, rotate right, and neutral. Additional actions include grab and release, but these are handled separately.
Results
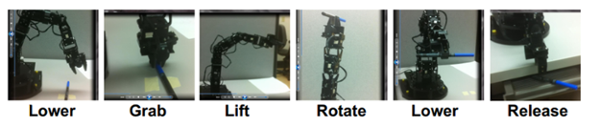
Results for the classified actions are calculated quickly but with variable reliability that varies from subject to subject. If fewer commands are used, for example, if categories are limited to lift and lower, then accuracy increases greatly. Grab and release, are controlled using specific signals created by muscle movement rather than pure EEG signals as the control mechanism. The majority of subjects are able to execute these commands with accuracy and ease.